Purpose
I built a fully autonomous robot from scratch, integrating mechanical design, embedded systems, and sensor-based navigation into a single working system.
Description
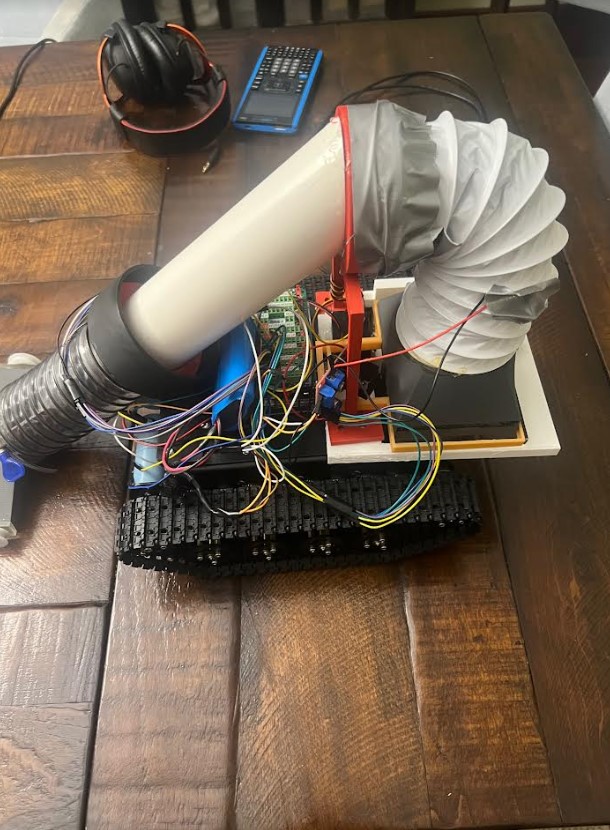
The robot drives across a surface using a vacuum to lift sand and microplastics, then sifts the mixture to separate plastic into a collection bin while returning sand to the surface. It is built on a modified chassis with 3D-printed structural parts and controlled by an Arduino Mega managing four motors: two for drive, one for the vacuum, and one for the sifting mechanism. A BNO055 IMU and PID controller keep the robot on a straight, lawn-mower-style path.

Skills Needed/Learned
Process
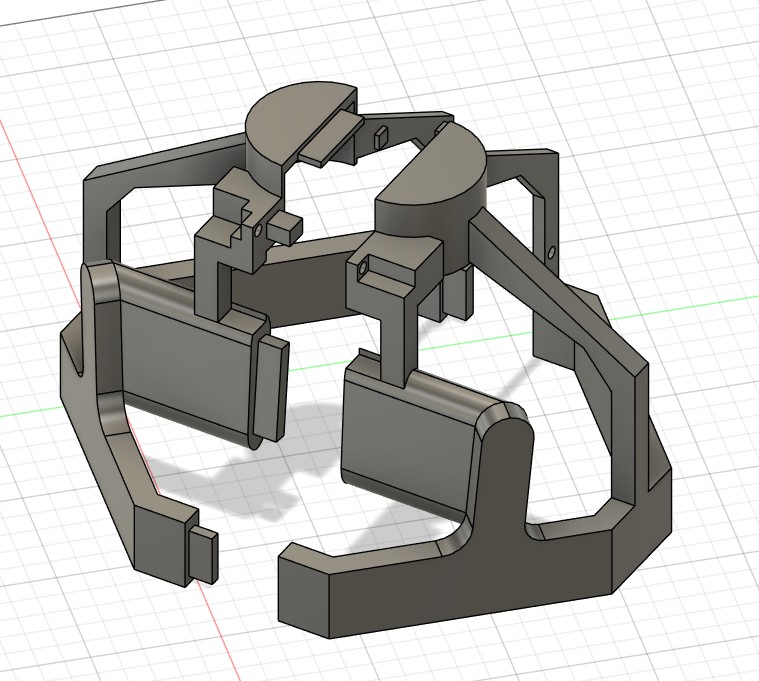
I started with a problem I found interesting and worked backwards: figuring out what hardware, skills, and software I would need to solve it. With limited access to parts and tools in Bermuda, I sourced components from Amazon and repurposed household items into a functioning frame. During the school year I 3D-printed structural components requiring precise measurements. Back in Bermuda, I wired and assembled the full system, then tackled the software: coordinating four motors simultaneously, implementing a PID controller with encoder feedback, and integrating IMU-based heading correction into a unified navigation loop.
Results
The core systems performed as designed: the robot navigated in a straight line using PID control. The biggest takeaway was the experience of independently driving a complex, multi-disciplinary project from idea to working prototype under real constraints.
Higher quality motors and encoders would allow for much better PID control. The navigation and coordination concepts explored here are ones I'd like to build on in future, larger-scale robotics projects.